Hopping space robot SpaceBok plays live-action ping pong!
A dog-like robot which is being developed to hop across complex terrain on other planets has been used to play a live-action game of ping pong in its latest phase of testing.
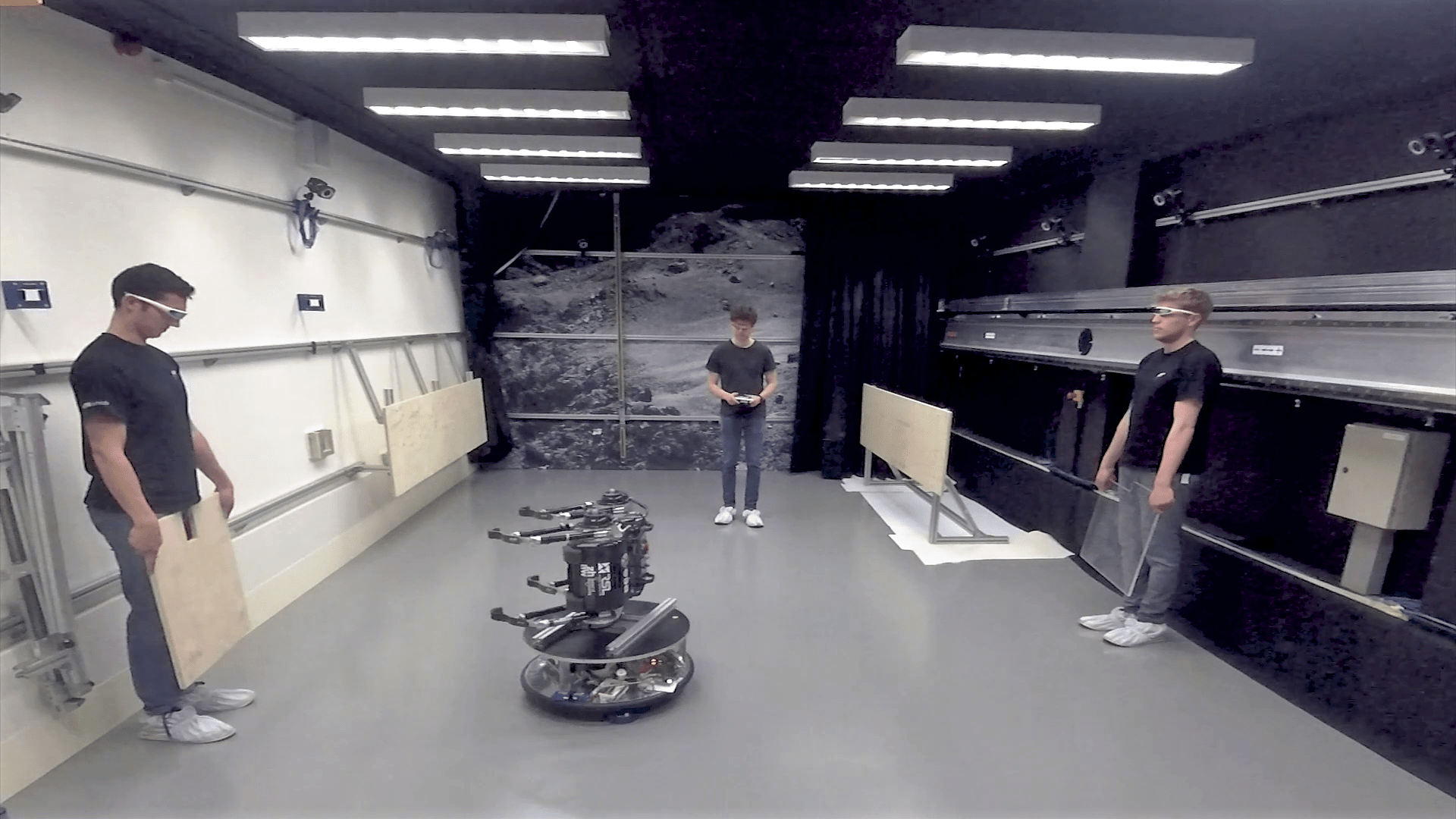
Scientists mounted the SpaceBok sideways onto a free-floating platform to mimic a zero gravity environment in two dimensions, while moving themselves side to side with a panel for the robot to bounce from.
A reaction wheel helps the robot stabilise itself, swivelling 180 degrees mid-jump to position its feet on to the panel and push onto the opposite side.
The idea behind the project is to change how scientists explore the moon, asteroids and Mars by trading wheels commonly seen on rovers – which can become stuck on rocky surfaces – for jumping legs.
The versatility of legs means that it could also be used to look into areas that a rover would struggle to reach, such as a crater, cave or highlands.
“The reason for the jumping experiments was to investigate what sort of walking gaits turn out to be efficient in the low gravity environment of, for example, the moon,” Hendrik Kolvenbach told PA.
“The technology of dynamically walking legged robots for terrestrial application is rather new – if you look at what Boston Dynamics, Anybotics and the MIT is doing in recent years – and thus it is definitely something that we will only see in space in the long term with many technical challenges yet to overcome.”

The PhD student from ETH Zurich university is currently leading tests of the technology at the European Space Agency’s (ESA) robotic facilities in the Netherlands.
Researchers believe that SpaceBok could jump up to two metres high in lunar gravity.
As well as using a reaction wheel to stabilise the robot, springs in its legs store energy during landing and release it at take-off, reducing the amount of energy required to carry out jumps.
“The ping pong game was a nice way to demonstrate the capability of the robot to control its attitude and position its feet for landing in an extremely low-gravity environment – typically to be found on small moons or even asteroids,” he added.